Lecture 16 - Convolutional Neural Networks¶

![]()
16.1 Introduction to Convolutional Neural Networks¶
Convolutional Neural Networks (CNNs), also known as ConvNets have accelerated various computer vision tasks, such as image recognition and classification, image segmentation, and object detection. CNNs have been used in related applications, including autonomous vehicles, medical image diagnosis, intelligent robots, and others.
A typical architecture of CNN is shown below and consists of 3 main types of layers: convolutional layers, pooling layers, and fully-connected (dense) layers. CNNs typically have multiple blocks of convolutional and pooling layers, followed by fully-connected layers. The optimal number of layers is task-dependent, and it is a hyperparameter that needs to be tuned by the user during the training and model selection step.

Figure: Architecture of a CNN.
Each layer in CNNs transforms the input images into a higher-level representation. The initial layers in CNNs learn low-level features (such as edges and lines), the middle layers learn mid-level features (e.g., textures and parts), and the last layers learn high-level features (such as objects). The fully-connected layers use the high-level features to classify the input image.

Figure: Extracted features in a CNN.
Convolutional Layers¶
The process of convolution is to pass a convolutional filter to each pixel in an image, multiply the corresponding pixels, and calculate the sum. This process is repeated until the filter is slid over all image pixels.

Figure: Convolution process.
Modern deep learning libraries, such as TensorFlow and PyTorch, allow to create convolutional layers in one line of code, as follows.
tf.keras.layers.Conv2D(…..)
Beside 2D convolutional filters that are used for processing images, 3D convolutional layers are used for analyzing videos, and 1D convolutional layers are used for analyzing time-series data.
The output of a convolutional layer is high-dimensional feature maps, and its dimension depends on the number of convolutional filters used in the layer. For example, if the layer has 32 filters, then we will have 32 feature maps at the output.
Pooling layers¶
Pooling layers are used to reduce the size of the feature maps output by convolutional layers, which reduces the number of network parameters and the computational cost for training the model. Pooling layers are also helpful for selecting more imporant information from the feature maps in the previous layer, they reduce the sensitivity of the model to the exact location of objects in inputs images, and they reduce the impact of noise in input data.
There are different pooling options, although the most common is the Maxpooling layer, which reduces the image sizes by keeping the pixels with the maximum intensity.
Implementing a pooling layer in most frameworks is very simple. The following figure depicts Maxpooling with a pool_size=2, which means that the output is the maximum value for each square of 2x2 pixels.
tf.keras.layers.MaxPooling2D(…)

Figure: Pooling layer with a pool_size=2.
The portion of the network that consists of convolutional and pooling layers is often called an encoder, since it is used for encoding the information in input data into a representation that is more useful for the task at hand. Similarly, the portion of the network that consists of fully-connected layers is referred to as classifier (head, top) of the network.
Fully-connected Layers (Densely-connected Layers)¶
The last layers in ConvNets are fully-connected layers, that match the produced feature maps from the previous layers to the labels of the original image.
tf.keras.layers.Dense(....)
16.2 Loading the Dataset¶
In this notebook, we are going to use one of the most well-known datasets for image classification called CIFAR-10.
CIFAR-10 consists of 60,000 color images in 10 categories. The 10 classes are: airplane, automobile, bird, cat, deer, dog, frog, horse, ship, truck.
Each class contains 6,000 images. In the dataset, 50,000 images are allocated for training, and 10,000 for testing. The top accuracy on the test dataset is about 90%.
You can learn more about the dataset here.
Note that there is a larger version with 100 classes called CIFAR-100.
CIFAR-10 is available in Keras built-in datasets, so we can simply load the data by using the helper function keras.datasets.cifar10.load_data().
[ ]:
# import required libraries
import tensorflow as tf
from tensorflow import keras
import numpy as np
import matplotlib.pyplot as plt
[ ]:
# Print the version of tf
print("TensorFlow version:{}".format(tf.__version__))
TensorFlow version:2.13.0
[ ]:
# Load the train and test images and labels
(train_data, train_label), (test_data, test_label) = keras.datasets.cifar10.load_data()
Downloading data from https://www.cs.toronto.edu/~kriz/cifar-10-python.tar.gz
170498071/170498071 [==============================] - 3s 0us/step
As usual, we can inspect the shapes of the training and testing datasets.
Note that each image is a 32x32x3 tensor, having a size of 32x32 pixels and 3 channels corresponding to the RGB (red-green-blue) channels.
[ ]:
print('Training images', train_data.shape)
print('Training labels', train_label.shape)
print('Testing images', test_data.shape)
print('Testing labels', test_label.shape)
Training images (50000, 32, 32, 3)
Training labels (50000, 1)
Testing images (10000, 32, 32, 3)
Testing labels (10000, 1)
Data Preprocessing¶
The values for the pixel intensities in the images are in the range between 0 and 255. The type is uint8 which stands for unsigned integer with 8 bits, that is, the possible values are between \(2^0=1\) and \(2^8=256\). This means that each pixel has an intensity value in that range, where 0 is a black pixel, 255 is a white pixel, and all other colors are in between.
[ ]:
# Display the range of images
print('Max pixel value', np.max(train_data))
print('Min pixel value', np.min(train_data))
print('Average pixel value', np.mean(train_data))
print('Data type', train_data[0].dtype)
Max pixel value 255
Min pixel value 0
Average pixel value 120.70756512369792
Data type uint8
When processing image data with neural networks, the pixel values are commonly normalized to the [0, 1] range. This allows the networks to train faster and it usually leads to better results. Let’s normalize the images by dividing them with the maximum intensity of 255, and check again if the scaled data look correct. Note that the data type after the normalization is float64.
[ ]:
# Normalize the images
train_data = train_data / 255
test_data = test_data / 255
[ ]:
# Display the range of images (to make sure they are in the [0, 1] range)
print('Max pixel value', np.max(train_data))
print('Min pixel value', np.min(train_data))
print('Average pixel value', np.mean(train_data))
print('Data type', train_data[0].dtype)
Max pixel value 1.0
Min pixel value 0.0
Average pixel value 0.4733630004850874
Data type float64
The labels for the 10 classes in CIFAR-10 are shown below.
Label |
Description |
|---|---|
0 |
airplane |
1 |
automobile |
2 |
bird |
3 |
cat |
4 |
deer |
5 |
dog |
6 |
frog |
7 |
horse |
8 |
ship |
9 |
truck |
Let’s inspect the first 10 values in the labels. We can see that each label corresponds to one of the 10 categories.
Also, in the next cell we plotted the first 100 labels, and we can notice that they have values between 0 and 9, so everything looks good.
[ ]:
print(train_label[:10])
[[6]
[9]
[9]
[4]
[1]
[1]
[2]
[7]
[8]
[3]]
[ ]:
plt.plot(train_label[:100], 'o')
plt.show()

We can convert the labels to one-hot encoded values, by using the Keras function to_categorical. This transforms each label into a row of 10 values, since there are 10 classes. Note that for the first row now only the column with index 6 is 1, for the second row the last column is 1, etc., and all other values are 0.
[ ]:
# Convert the labels to one-hot encoding format
train_label_onehot = keras.utils.to_categorical(train_label, 10)
test_label_onehot = keras.utils.to_categorical(test_label, 10)
print('Labels train shape: {}'.format(train_label_onehot.shape))
Labels train shape: (50000, 10)
[ ]:
# Check the labels
train_label_onehot[:5]
array([[0., 0., 0., 0., 0., 0., 1., 0., 0., 0.],
[0., 0., 0., 0., 0., 0., 0., 0., 0., 1.],
[0., 0., 0., 0., 0., 0., 0., 0., 0., 1.],
[0., 0., 0., 0., 1., 0., 0., 0., 0., 0.],
[0., 1., 0., 0., 0., 0., 0., 0., 0., 0.]], dtype=float32)
Let’s visualize some images to see what they look like. We can notice that the resolution is quite low, since they are 32x32 pixels.
[ ]:
label_names = ['airplane', 'automobile', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck']
# Plot a few images to check if the labels are correct
plt.figure(figsize=(12, 9))
for n in range(9):
i = np.random.randint(0, len(train_data), 1)
ax = plt.subplot(3, 3, n+1)
plt.imshow(train_data[i[0]])
plt.title('Label: ' + str(label_names[train_label[i[0]][0]]))
plt.axis('off')

16.3 Creating, Training, and Evaluating a CNN Model¶
Create the CNN¶
Next, we are going to define the network architecture with the Keras library, which is a high-level API developed on top of TensorFlow. Recall from the previous lecture that the main data structures in Keras are layers and models.
In the first cell below we imported the layers, and afterward we defined the layers.
We need to first introduce an Input layer to provide the size of the data, and in this case, the shape of the input data is set to (32,32,3). This is because the images are arrays with shape 32x32x3.
Next, we will include a convolutional layer Conv2D. The arguments of Conv2D layer in Keras are:
filters: define the number of filters in the layer.kernel_size: the height and width of each filter, defined as an integer such askernel_size=3, or a tuple such askernel_size=(3,3).padding: it is not a very important argument, when it is equal to'same'it means that the output images are the same size as input images; otherwise, the output images can be slightly smaller.
Next, we will include a pooling layer MaxPooling2D. We can specify the pooling size with the pool_size argument, such as pool_size=3. Otherwise, the default pool size is 2.
ConvNets typically consist of several blocks of convolutional and pooling layers.
And Fully Connected Layers are used for matching the compressed feature maps to their labels.
And there is one more layer that is used called Flatten. This layer is needed because the outputs of the convolutional and maxpooling layers are 3-dimensional tensors, but the dense layers require one-dimensional data (vectors). The Flatten layer just concatenates (flattens) all dimensions of a tensor into an 1D array.
For example, the following layer that we defined below,
conv1b = Conv2D(filters=32, kernel_size=3, padding='same')(conv1a)
is a convolutional layer, which takes as input the previous layer named conv1a. The layer conv1b has 32 convolutional filters of size 3, and padding is applied to preserve the size of the images.
[ ]:
# import the layers and the model
from keras.models import Model
from keras.layers import Input
from keras.layers import Conv2D
from keras.layers import MaxPooling2D
from keras.layers import Dense
from keras.layers import Flatten
[ ]:
# Define the layers in the model
inputs = Input(shape=(32, 32, 3))
conv1a = Conv2D(filters=32, kernel_size=3, padding='same')(inputs)
conv1b = Conv2D(filters=32, kernel_size=3, padding='same')(conv1a)
pool1 = MaxPooling2D()(conv1b)
conv2a = Conv2D(filters=64, kernel_size=3, padding='same')(pool1)
conv2b = Conv2D(filters=64, kernel_size=3, padding='same')(conv2a)
pool2 = MaxPooling2D()(conv2b)
conv3a = Conv2D(filters=128, kernel_size=3, padding='same')(pool2)
conv3b = Conv2D(filters=128, kernel_size=3, padding='same')(conv3a)
pool3 = MaxPooling2D()(conv3b)
flat = Flatten()(pool3)
dense1 = Dense(128, activation='relu')(flat)
dense2 = Dense(64, activation='relu')(dense1)
outputs = Dense(10, activation='softmax')(dense2)
# Define the model with inputs and outputs
cifar_cnn = Model(inputs, outputs)
Also note that in multi-class classification problems, the last Dense layer has softmax activation function. Softmax activation outputs a multiclass probability distribution, that is, it computes the probability that an image belongs to one of the 10 classes.
After we define the layers, we create the model as an instance of the Model class, for which the arguments are the input and output layers.
We can inspect the architecture of the CNN with cifar_cnn.summary().
[ ]:
# Model summary
cifar_cnn.summary()
Model: "model"
_________________________________________________________________
Layer (type) Output Shape Param #
=================================================================
input_1 (InputLayer) [(None, 32, 32, 3)] 0
conv2d (Conv2D) (None, 32, 32, 32) 896
conv2d_1 (Conv2D) (None, 32, 32, 32) 9248
max_pooling2d (MaxPooling2 (None, 16, 16, 32) 0
D)
conv2d_2 (Conv2D) (None, 16, 16, 64) 18496
conv2d_3 (Conv2D) (None, 16, 16, 64) 36928
max_pooling2d_1 (MaxPoolin (None, 8, 8, 64) 0
g2D)
conv2d_4 (Conv2D) (None, 8, 8, 128) 73856
conv2d_5 (Conv2D) (None, 8, 8, 128) 147584
max_pooling2d_2 (MaxPoolin (None, 4, 4, 128) 0
g2D)
flatten (Flatten) (None, 2048) 0
dense (Dense) (None, 128) 262272
dense_1 (Dense) (None, 64) 8256
dense_2 (Dense) (None, 10) 650
=================================================================
Total params: 558186 (2.13 MB)
Trainable params: 558186 (2.13 MB)
Non-trainable params: 0 (0.00 Byte)
_________________________________________________________________
Compile the CNN¶
Next, we need to compile the model, and provide the loss function, optimizer, and metric.
From the previous lecture, we know that the following three crossentropy losses are commonly used in Keras:
binary_crosssentropyused for binary classification (i.e., there are only 2 classes).categorical_crossentropyused for multiclass classification (3 and more classes) and the target labels are encoded in one-hot matrix format.sparse_categorical_crossentropyused for multiclass classification (3 and more classes) and the target labels are encoded in ordinal format.
Since we converted the target labels into one-hot encoding format, we will use categorical crossentropy.
Let’s use the Adam optimizer, and accuracy metric.
[ ]:
cifar_cnn.compile(optimizer='adam',
loss='categorical_crossentropy',
metrics=['accuracy'])
Train the CNN¶
Training CNNs is similar to training Fully-connected NNs. We use the fit function and list the train data and labels, number of epochs, and batch size. Here we used a batch size of 128 images, hence, since the training dataset has 50,000 images, the updates of the model parameters will be repeated 50,000/128 = 391 times (notice this number under the Epoch in the cell output below). Since we selected 10 epochs, this means there will be 3,910 training steps in total.
[ ]:
cifar_cnn.fit(train_data, train_label_onehot, epochs=10, batch_size=128)
Epoch 1/10
391/391 [==============================] - 17s 13ms/step - loss: 1.4524 - accuracy: 0.4773
Epoch 2/10
391/391 [==============================] - 5s 12ms/step - loss: 0.9526 - accuracy: 0.6673
Epoch 3/10
391/391 [==============================] - 5s 12ms/step - loss: 0.7646 - accuracy: 0.7346
Epoch 4/10
391/391 [==============================] - 6s 14ms/step - loss: 0.6408 - accuracy: 0.7783
Epoch 5/10
391/391 [==============================] - 6s 14ms/step - loss: 0.5399 - accuracy: 0.8123
Epoch 6/10
391/391 [==============================] - 5s 12ms/step - loss: 0.4562 - accuracy: 0.8411
Epoch 7/10
391/391 [==============================] - 7s 17ms/step - loss: 0.3865 - accuracy: 0.8641
Epoch 8/10
391/391 [==============================] - 5s 13ms/step - loss: 0.3291 - accuracy: 0.8851
Epoch 9/10
391/391 [==============================] - 5s 12ms/step - loss: 0.2797 - accuracy: 0.9020
Epoch 10/10
391/391 [==============================] - 5s 12ms/step - loss: 0.2475 - accuracy: 0.9130
<keras.src.callbacks.History at 0x78fa92328b20>
Evaluate on Test Data¶
We can first use the predict function to output the class for each image in the test dataset, and afterward use accuracy_score to calculate the accuracy.
[ ]:
from sklearn.metrics import accuracy_score
preds = cifar_cnn.predict(test_data)
accuracy = accuracy_score(test_label, np.argmax(preds, axis=1))
print('The test accuracy is {0:5.2f} %'.format(accuracy*100))
313/313 [==============================] - 1s 3ms/step
The test accuracy is 73.00 %
We can check that the shape of the predicted outputs is (10000,10), since there are 10,000 test images and 10 classes,
Let’s also display the predictions for the first 5 test images in the following cell. The model outputs probabilities for each of the 10 classes. The probabilities sum to 1. For instance, for the first test image, the model assigned the highest probability of 0.99 to the class with index 3.
[ ]:
# check the shape of the predictions
preds.shape
(10000, 10)
[ ]:
# display the predictions for the first 5 test images
print('Predictions for first 5 test images:\n', np.around(preds[:5],3))
Predictions for first 5 test images:
[[0. 0. 0. 0.99 0. 0.01 0. 0. 0. 0. ]
[0.004 0.754 0. 0. 0. 0. 0. 0. 0.241 0.002]
[0. 0. 0. 0. 0. 0. 0. 0. 0.993 0.006]
[0.825 0. 0. 0. 0. 0. 0. 0. 0.174 0. ]
[0. 0. 0. 0. 0. 0. 1. 0. 0. 0. ]]
Next, let’s output the indices with the highest probability for each image with np.argmax, and compare them to the ground-truth labels.
[ ]:
# print the index with highest probability for the first 5 test images
np.argmax(preds[:5], axis=1)
array([3, 1, 8, 0, 6])
[ ]:
# print the ground-truth label for the first 5 test images
test_label[:5]
array([[3],
[8],
[8],
[0],
[6]], dtype=uint8)
And, a simpler way to calculate only the accuracy is with evaluate.
[ ]:
# Evaluate on test dataset
evals_test = cifar_cnn.evaluate(test_data, test_label_onehot)
print("Classification Accuracy: ", evals_test[1])
313/313 [==============================] - 1s 3ms/step - loss: 1.1302 - accuracy: 0.7300
Classification Accuracy: 0.7300000190734863
The important thing to notice is that the accuracy on the training dataset reached about 90%, while the accuracy on the test dataset is 73%. This means that the model overfits the training data. That is, the model begins to memorize the training data, and it learns to predict on the training dataset very well, but the generalization ability on unseen images is quite low. In the next sections we will learn how to deal with that.
Plot the Predictions¶
But first, let’s plot a few images and the predicted class labels by the model.
[ ]:
# Plot a few images to check them
plt.figure(figsize=(12, 6))
for n in range(9):
i = np.random.randint(0, len(test_data), 1)
ax = plt.subplot(3, 3, n+1)
plt.imshow(test_data[i[0]])
plt.title('Label: ' + str(label_names[test_label[i[0]][0]]) + ' Predicted: ' + str(label_names[np.argmax(preds[i[0]])]))
plt.axis('off')

16.4 Introduce a Validation Dataset¶
To be able to observe if the model overfits, one more dataset is introduced, referred to as a validation dataset. The original training dataset is typically randomly split, and approximately 70-80% is used as a training dataset, and 20-30% is used as a validation dataset.
This way, at the end of every epoch, we will calculate the accuracy of the model on the validation dataset. As the model is trained, if the training accuracy increases, but the validation accuracy decreases, it means that the model begins to overfit.
In Keras, the fit function has a validation_split argument, which allows us to use a percent of the training data for validation. In the next cell, we will use 20%, meaning that out of the 50,000 training images, the model will use 40,000 for training, and 10,000 for validation. An alternative way to introduce validation dataset is to first manually split the training dataset into two subsets of data, and in the fit function to pass the validation features and labels as a tuple named
validation_data. However, the first option with using a validation_split argument is much simpler, and therefore preferred.
Note also that in the cell below we will just continue training the same model. If we re-defined and re-compiled the model, we would have begun the training from scratch.
Now we can notice the overfitting, because the training accuracy continues to increase, but the validation accuracy decreases.
[ ]:
cifar_cnn.fit(train_data, train_label_onehot,
epochs=10, batch_size=128,
validation_split=0.2)
Epoch 1/10
313/313 [==============================] - 5s 17ms/step - loss: 0.2223 - accuracy: 0.9208 - val_loss: 0.2551 - val_accuracy: 0.9123
Epoch 2/10
313/313 [==============================] - 4s 14ms/step - loss: 0.1890 - accuracy: 0.9344 - val_loss: 0.3026 - val_accuracy: 0.8928
Epoch 3/10
313/313 [==============================] - 4s 13ms/step - loss: 0.1653 - accuracy: 0.9440 - val_loss: 0.3451 - val_accuracy: 0.8859
Epoch 4/10
313/313 [==============================] - 4s 14ms/step - loss: 0.1461 - accuracy: 0.9494 - val_loss: 0.3874 - val_accuracy: 0.8771
Epoch 5/10
313/313 [==============================] - 4s 13ms/step - loss: 0.1552 - accuracy: 0.9463 - val_loss: 0.4818 - val_accuracy: 0.8587
Epoch 6/10
313/313 [==============================] - 4s 14ms/step - loss: 0.1367 - accuracy: 0.9533 - val_loss: 0.4675 - val_accuracy: 0.8638
Epoch 7/10
313/313 [==============================] - 4s 14ms/step - loss: 0.1320 - accuracy: 0.9553 - val_loss: 0.5117 - val_accuracy: 0.8595
Epoch 8/10
313/313 [==============================] - 4s 14ms/step - loss: 0.1268 - accuracy: 0.9568 - val_loss: 0.6008 - val_accuracy: 0.8423
Epoch 9/10
313/313 [==============================] - 5s 14ms/step - loss: 0.1170 - accuracy: 0.9603 - val_loss: 0.6020 - val_accuracy: 0.8495
Epoch 10/10
313/313 [==============================] - 4s 14ms/step - loss: 0.1050 - accuracy: 0.9664 - val_loss: 0.6615 - val_accuracy: 0.8443
<keras.src.callbacks.History at 0x78f9ac92dfc0>
[ ]:
# Evaluate on test dataset
evals_test = cifar_cnn.evaluate(test_data, test_label_onehot)
print("Classification Accuracy: ", evals_test[1])
313/313 [==============================] - 1s 3ms/step - loss: 1.7219 - accuracy: 0.7239
Classification Accuracy: 0.7239000201225281
16.5 Dropout Layers¶
One way to deal with overfitting in neural networks is to introduce Dropout layers. The idea of dropout is very simple: during the training, at each step of processing a batch of images, a portion of the neurons in a layer are randomly disabled. This introduces randomness in the network, and it helps to improve model performance and reduce overfitting.
Dropout can be considered to be similar to the ensemble methods, where during each iteration, a slightly different model is trained, which uses only a portion of all neurons.
In the next cell, we add several dropout layers, where for instance, dropout of 0.2 means that 20% of the neurons in that layer are randomly dropped.
[ ]:
from keras.layers import Dropout
# Define the layers
inputs = Input(shape=(32, 32, 3))
conv1a = Conv2D(filters=32, kernel_size=3, padding='same')(inputs)
conv1b = Conv2D(filters=32, kernel_size=3, padding='same')(conv1a)
pool1 = MaxPooling2D()(conv1b)
dropout1 = Dropout(0.2)(pool1)
conv2a = Conv2D(filters=64, kernel_size=3, padding='same')(dropout1)
conv2b = Conv2D(filters=64, kernel_size=3, padding='same')(conv2a)
pool2 = MaxPooling2D()(conv2b)
dropout2 = Dropout(0.2)(pool2)
conv3a = Conv2D(filters=256, kernel_size=3, padding='same')(dropout2)
conv3b = Conv2D(filters=256, kernel_size=3, padding='same')(conv3a)
pool3 = MaxPooling2D()(conv3b)
flat = Flatten()(pool3)
dense1 = Dense(128, activation='relu')(flat)
dropout3 = Dropout(0.2)(dense1)
dense2 = Dense(64, activation='relu')(dropout3)
dropout4 = Dropout(0.2)(dense2)
outputs = Dense(10, activation='softmax')(dropout4)
# Define the model with inputs and outputs
cifar_cnn_2 = Model(inputs, outputs)
[ ]:
# compile model
cifar_cnn_2.compile(optimizer='adam',
loss='categorical_crossentropy',
metrics=['accuracy'])
# fit model
history = cifar_cnn_2.fit(train_data, train_label_onehot,
epochs=40, batch_size=128,
validation_split=0.2, verbose=0)
[ ]:
# Evaluate on test dataset
evals_test = cifar_cnn_2.evaluate(test_data, test_label_onehot)
print("Classification Accuracy: ", evals_test[1])
313/313 [==============================] - 1s 4ms/step - loss: 1.0808 - accuracy: 0.7516
Classification Accuracy: 0.7516000270843506
The performance was increased to about 75.1% from the initial 73% for the model without dropout layers.
Let’s create a figure with the learning curves, to show the accuracy and loss of the model. The blue lines indicate the model performance on the training dataset and the red lines indicate the performance on the validation dataset.
We can notice that overfitting begins around epoch 15, when the training accuracy increases, but the validation accuracy stays about the same. Similarly, the training loss decreases, but the validation loss increases after epoch 15. The plots of the accuracy and loss are fairly correlated, however as we can see the accuracy can stay constant when the loss is changing.
[ ]:
# plot the accuracy and loss
train_loss = history.history['loss']
val_loss = history.history['val_loss']
acc = history.history['accuracy']
val_acc = history.history['val_accuracy']
epochsn = np.arange(1, len(train_loss)+1,1)
plt.figure(figsize=(12, 4))
plt.subplot(1,2,1)
plt.plot(epochsn, acc, 'b', label='Training Accuracy')
plt.plot(epochsn, val_acc, 'r', label='Validation Accuracy')
plt.grid(color='gray', linestyle='--')
plt.legend()
plt.title('ACCURACY')
plt.xlabel('Epochs')
plt.ylabel('Accuracy')
plt.subplot(1,2,2)
plt.plot(epochsn,train_loss, 'b', label='Training Loss')
plt.plot(epochsn,val_loss, 'r', label='Validation Loss')
plt.grid(color='gray', linestyle='--')
plt.legend()
plt.title('LOSS')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.show()

16.6 Batch Normalization¶
Another type of layers that are used to reduce overfitting are Batch Normalization layers.
Similarly to scaling the input features to range [0,1] or to a Gaussian distribution with 0 mean and 1 standard deviation, Batch Normalization layers scale a batch of data to have 0 mean and 1 standard deviation. This reduces the instability in training the network due to differences among batches of data, and also reduces the overfitting.
[ ]:
from keras.layers import BatchNormalization
# Define the layers
inputs = Input(shape=(32, 32, 3))
conv1a = Conv2D(filters=32, kernel_size=3, padding='same')(inputs)
conv1b = Conv2D(filters=32, kernel_size=3, padding='same')(conv1a)
bn1 = BatchNormalization()(conv1b)
pool1 = MaxPooling2D()(bn1)
dropout1 = Dropout(0.2)(pool1)
conv2a = Conv2D(filters=64, kernel_size=3, padding='same')(dropout1)
conv2b = Conv2D(filters=64, kernel_size=3, padding='same')(conv2a)
bn2 = BatchNormalization()(conv2b)
pool2 = MaxPooling2D()(bn2)
dropout2 = Dropout(0.2)(pool2)
conv3a = Conv2D(filters=256, kernel_size=3, padding='same')(dropout2)
conv3b = Conv2D(filters=256, kernel_size=3, padding='same')(conv3a)
bn3 = BatchNormalization()(conv3b)
pool3 = MaxPooling2D()(bn3)
flat = Flatten()(pool3)
dense1 = Dense(128, activation='relu')(flat)
dropout3 = Dropout(0.2)(dense1)
dense2 = Dense(64, activation='relu')(dropout3)
dropout4 = Dropout(0.2)(dense2)
outputs = Dense(10, activation='softmax')(dropout4)
# Define the model with inputs and outputs
cifar_cnn_3 = Model(inputs, outputs)
[ ]:
# compile model
cifar_cnn_3.compile(optimizer='adam',
loss='categorical_crossentropy',
metrics=['accuracy'])
Also, let’s use the argument verbose=0 to not display the loss and accuracy after every epoch. Instead, after the training is complete, we will display the learning curves to observe the performance of the model. We increased the number of epochs to 60 for this model.
And, we will use the datatime python library to measure and display the training time of the model.
[ ]:
import datetime
now = datetime.datetime.now
t = now()
# fit model
history = cifar_cnn_3.fit(train_data, train_label_onehot,
epochs=60, batch_size=128,
validation_split=0.2, verbose=0)
print('Training time: %s' % (now() - t))
Training time: 0:07:25.850362
[ ]:
# plot the accuracy and loss
train_loss = history.history['loss']
val_loss = history.history['val_loss']
acc = history.history['accuracy']
val_acc = history.history['val_accuracy']
epochsn = np.arange(1, len(train_loss)+1,1)
plt.figure(figsize=(12, 4))
plt.subplot(1,2,1)
plt.plot(epochsn, acc, 'b', label='Training Accuracy')
plt.plot(epochsn, val_acc, 'r', label='Validation Accuracy')
plt.grid(color='gray', linestyle='--')
plt.legend()
plt.title('ACCURACY')
plt.xlabel('Epochs')
plt.ylabel('Accuracy')
plt.subplot(1,2,2)
plt.plot(epochsn,train_loss, 'b', label='Training Loss')
plt.plot(epochsn,val_loss, 'r', label='Validation Loss')
plt.grid(color='gray', linestyle='--')
plt.legend()
plt.title('LOSS')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.show()

[ ]:
# Evaluate on test dataset
evals_test = cifar_cnn_3.evaluate(test_data, test_label_onehot)
print("Classification Accuracy: ", evals_test[1])
313/313 [==============================] - 1s 4ms/step - loss: 0.9479 - accuracy: 0.7658
Classification Accuracy: 0.7657999992370605
With the Batch Normalization layers in the model, the test accuracy increased to 76.6%.
16.7 Data Augmentation¶
One of the main reasons for overfitting is the lack of sufficient training samples, or lack of diversity in the training samples, for training a model.
To deal with overfitting we can use data augmentation, which refers to expanding the existing dataset by applying different image transformation operations. Examples are flipping the image vertically or horizontally, cropping the image, changing the contrast and color of the image, adding noise to the image, rotating the image at a given degree, and similar.
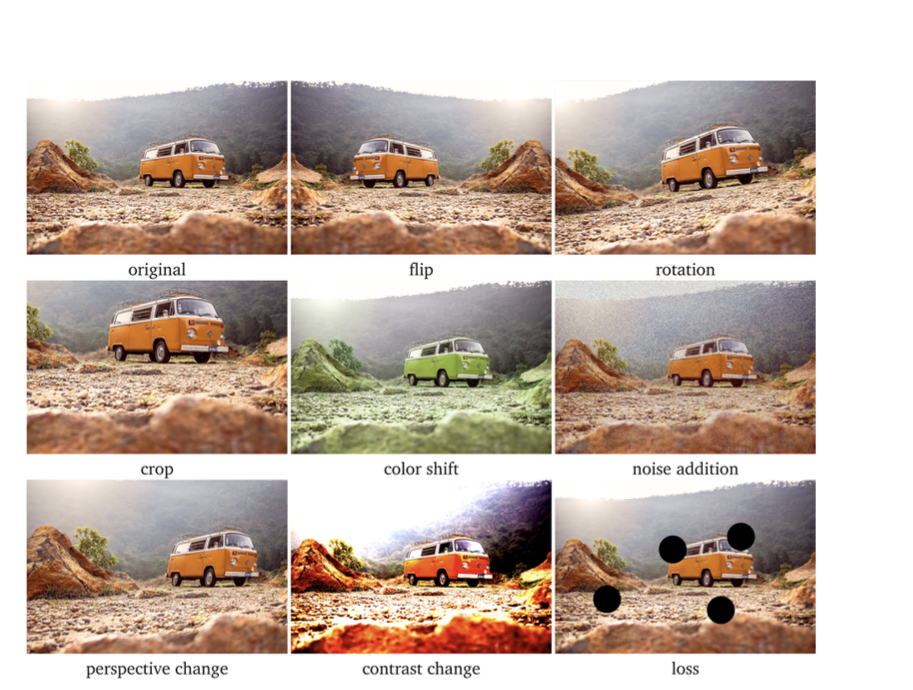
By doing data augmentation, we are synthesizing new images from existing data, as well as introducing some diversity in the images.
Keras provides the function ImageDataGenerator for data augmentation. Among the available operations for data augmentation are:
rotation_range is a value in degrees (0–180) to randomly rotate images.
width_shift and height_shift are ranges of fraction of total width or height within which to translate pictures, either vertically or horizontally.
shear_range is for applying shearing randomly.
zoom_range is for zooming in pictures randomly.
horizontal_flip and vertical_flip are for flipping images.
In the example below we applied width shift, height shift, and horizontal flip.
[ ]:
from keras.preprocessing.image import ImageDataGenerator
# create data generator
datagen = ImageDataGenerator(width_shift_range=0.1, height_shift_range=0.1, horizontal_flip=True)
ImageDataGenerator returns both the augmented images and their labels for each batch of images.
Let’s plot a few images to see what they look like. They don’t look much different, but that is because the applied shift and flip are not very large, and we didn’t use other operations.
[ ]:
# Get images in batch of 20
aug_iterator = datagen.flow(train_data, train_label, batch_size=1)
plt.figure(figsize=(12,4))
for i in range(6):
ax = plt.subplot(2, 3, i + 1)
plt.imshow(aug_iterator[i][0][0])
plt.title(str(label_names[aug_iterator[i][1][0][0]]))
plt.axis("off")

When we use data augmentation, the arguments in the fit function are slightly different. First, we need to provide the name of our defined generator with flow to yield a batch of augmented images. In this case, we will need to use datagen.flow, since we assigned the image generator to the name datagen.
We also need to specify steps_per_epoch, which oftentimes is just the number of training images divided by the batch size.
Also, the generator in Keras does not accept a validation_split argument, and therefore we need to manually create a validation dataset, and then use it. This has been done in the next cells.
[ ]:
# Define the model with inputs and outputs
cifar_cnn_4 = Model(inputs, outputs)
# compile model
cifar_cnn_4.compile(optimizer='adam',
loss='categorical_crossentropy',
metrics=['accuracy'])
[ ]:
# fit model
history = cifar_cnn_4.fit(datagen.flow(train_data, train_label, batch_size=128),
steps_per_epoch=len(train_data)/128, epochs=120,
validation_split=0.2, verbose=0)
# note that the generator does not work with validation split
---------------------------------------------------------------------------
TypeError Traceback (most recent call last)
<ipython-input-40-843b623e8eaf> in <cell line: 2>()
1 # fit model
----> 2 history = cifar_cnn_4.fit_generator(datagen.flow(train_data, train_label, batch_size=128),
3 steps_per_epoch=len(train_data)/128, epochs=120,
4 validation_split=0.2, verbose=0)
5
TypeError: Model.fit_generator() got an unexpected keyword argument 'validation_split'
[ ]:
from sklearn.model_selection import train_test_split
train_data_1, validation_data_1, train_label_1, validation_label_1 = train_test_split(train_data, train_label_onehot, test_size=0.2, random_state=20, stratify=train_label_onehot)
[ ]:
print('Training images', train_data_1.shape)
print('Training labels', train_label_1.shape)
print('Validation_images', validation_data_1.shape)
print('Validation labels', validation_label_1.shape)
Training images (40000, 32, 32, 3)
Training labels (40000, 10)
Validation_images (10000, 32, 32, 3)
Validation labels (10000, 10)
[ ]:
t = now()
# fit model
history= cifar_cnn_4.fit(datagen.flow(train_data_1, train_label_1, batch_size=128),
steps_per_epoch=len(train_data_1)/128, epochs=100,
validation_data=(validation_data_1, validation_label_1), verbose=0)
print('Training time: %s' % (now() - t))
Training time: 0:48:39.114947
[ ]:
# plot the accuracy and loss
train_loss = history.history['loss']
val_loss = history.history['val_loss']
acc = history.history['accuracy']
val_acc = history.history['val_accuracy']
epochsn = np.arange(1, len(train_loss)+1,1)
plt.figure(figsize=(12, 4))
plt.subplot(1,2,1)
plt.plot(epochsn, acc, 'b', label='Training Accuracy')
plt.plot(epochsn, val_acc, 'r', label='Validation Accuracy')
plt.grid(color='gray', linestyle='--')
plt.legend()
plt.title('ACCURACY')
plt.xlabel('Epochs')
plt.ylabel('Accuracy')
plt.subplot(1,2,2)
plt.plot(epochsn,train_loss, 'b', label='Training Loss')
plt.plot(epochsn,val_loss, 'r', label='Validation Loss')
plt.grid(color='gray', linestyle='--')
plt.legend()
plt.title('LOSS')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.show()

[ ]:
# Evaluate on test dataset
evals_test = cifar_cnn_4.evaluate(test_data, test_label_onehot)
print("Classification Accuracy: ", evals_test[1])
313/313 [==============================] - 1s 4ms/step - loss: 0.5681 - accuracy: 0.8155
Classification Accuracy: 0.815500020980835
The data augmentation was helpful to further improve the performance of the model to about 81.5% accuracy. We trained the model for 100 epochs, which took about 48 minutes. From the learning curves we can conclude that the accuracy was still increasing at epoch 100, therefore we could continue training the model, or we could have selected a higher number of epochs initially.
16.8 Transfer Learning¶
Transfer learning uses pretrained models that are trained on very large datasets to improve the performance on smaller datasets.
There are many pretrained models available in Keras Applications.
Typical steps in transfer learning include:
Initialize the pretrained model (base model) and weights, and remove the top layers (fully-connected layers) of the pretrained model.
Create a new model by adding new trainable fully-connected layers on top of the primary model.
Train the new model, and evaluate the performance.
In this case we will use the VGG16 model, which is popular for image classification. The model is imported with the weights pretrained on ImageNet, which is a very large dataset with 1.2 million images in 1,000 classes. Since our task has only 10 classes, we will remove the dense layers which are very specific to ImageNet’s 1,000 classes, and add our own custom layers with 10 classes.
Transfer learning is also often referred to as model fine-tuning, because we start with a pretrained model and we fine-tune its parameters to our custom dataset.
[ ]:
from tensorflow.keras.applications import vgg16
from keras.layers import GlobalAveragePooling2D
base_model = vgg16.VGG16(weights='imagenet', include_top=False, input_shape=(32,32,3))
# Add a global spatial average pooling layer
x = base_model.output
x = GlobalAveragePooling2D()(x)
x = Dense(128, activation='relu')(x)
x = Dropout(0.2)(x)
x = Dense(64, activation='relu')(x)
x = Dropout(0.2)(x)
predictions = Dense(10, activation='softmax')(x)
# The model we will train
cifar_cnn_5 = Model(inputs=base_model.input, outputs=predictions)
Downloading data from https://storage.googleapis.com/tensorflow/keras-applications/vgg16/vgg16_weights_tf_dim_ordering_tf_kernels_notop.h5
58889256/58889256 [==============================] - 0s 0us/step
Early Stopping¶
Keras has implemented several callbacks that allow to monitor the training process and have more control over it. We will study the various callbacks in the next lecture, and in this lecture we we explain how the callback Early Stopping works.
EarlyStopping monitors a metric (e.g., validation loss) and if the metric doesn’t improve for a certain number of epochs (a.k.a. patience), terminates the training. By improve, we mean the decrease if the metric is loss, or increase if the metric is accuracy.
[ ]:
from keras.callbacks import EarlyStopping
cifar_cnn_5.compile(optimizer='adam', loss='categorical_crossentropy', metrics = ['accuracy'])
# fit model
t = now()
history = cifar_cnn_5.fit(train_data, train_label_onehot, validation_split=0.2, batch_size=128,
epochs=100, verbose=0, callbacks=[EarlyStopping(monitor='val_loss', patience = 10)])
print('Training time: %s' % (now() - t))
Training time: 0:04:40.541954
[ ]:
# plot the accuracy and loss
train_loss = history.history['loss']
val_loss = history.history['val_loss']
acc = history.history['accuracy']
val_acc = history.history['val_accuracy']
epochsn = np.arange(1, len(train_loss)+1,1)
plt.figure(figsize=(12, 4))
plt.subplot(1,2,1)
plt.plot(epochsn, acc, 'b', label='Training Accuracy')
plt.plot(epochsn, val_acc, 'r', label='Validation Accuracy')
plt.grid(color='gray', linestyle='--')
plt.legend()
plt.title('ACCURACY')
plt.xlabel('Epochs')
plt.ylabel('Accuracy')
plt.subplot(1,2,2)
plt.plot(epochsn,train_loss, 'b', label='Training Loss')
plt.plot(epochsn,val_loss, 'r', label='Validation Loss')
plt.grid(color='gray', linestyle='--')
plt.legend()
plt.title('LOSS')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.show()

[ ]:
# Evaluate on test dataset
evals_test = cifar_cnn_5.evaluate(test_data, test_label_onehot)
print("Classification Accuracy: ", evals_test[1])
313/313 [==============================] - 3s 9ms/step - loss: 0.9085 - accuracy: 0.7865
Classification Accuracy: 0.7864999771118164
Although the accuracy is reduced, note that the model was trained in about 15 epochs, in comparison to 100 epochs or more epochs when trained from scratch.
The following figure illustrates the early stopping callback. When the validation loss starts increasing, it terminates the training. In our case, the validation loss reached minimum at epoch 6, and since we specified a 10 epochs patience, the model stopped at epoch 16.

Figure: Early stopping.
Let’s try to use a pretrained model and combine it with data augmentation and early stopping.
[ ]:
# The model we will train
cifar_cnn_6 = Model(inputs=base_model.input, outputs=predictions)
[ ]:
# compile model
cifar_cnn_6.compile(optimizer='adam',
loss='categorical_crossentropy',
metrics=['accuracy'])
[ ]:
t = now()
# fit model
history= cifar_cnn_6.fit(datagen.flow(train_data_1, train_label_1, batch_size=128),
steps_per_epoch=len(train_data_1)/128, epochs=100,
validation_data=(validation_data_1, validation_label_1), verbose=0,
callbacks=[EarlyStopping(monitor='val_loss', patience = 10)])
print('Training time: %s' % (now() - t))
Training time: 0:16:44.402687
[ ]:
# plot the accuracy and loss
train_loss = history.history['loss']
val_loss = history.history['val_loss']
acc = history.history['accuracy']
val_acc = history.history['val_accuracy']
epochsn = np.arange(1, len(train_loss)+1,1)
plt.figure(figsize=(12, 4))
plt.subplot(1,2,1)
plt.plot(epochsn, acc, 'b', label='Training Accuracy')
plt.plot(epochsn, val_acc, 'r', label='Validation Accuracy')
plt.grid(color='gray', linestyle='--')
plt.legend()
plt.title('ACCURACY')
plt.xlabel('Epochs')
plt.ylabel('Accuracy')
plt.subplot(1,2,2)
plt.plot(epochsn,train_loss, 'b', label='Training Loss')
plt.plot(epochsn,val_loss, 'r', label='Validation Loss')
plt.grid(color='gray', linestyle='--')
plt.legend()
plt.title('LOSS')
plt.xlabel('Epochs')
plt.ylabel('Loss')
plt.show()

[ ]:
# Evaluate on test dataset
evals_test = cifar_cnn_6.evaluate(test_data, test_label_onehot)
print("Classification Accuracy: ", evals_test[1])
313/313 [==============================] - 3s 9ms/step - loss: 0.5882 - accuracy: 0.8575
Classification Accuracy: 0.8575000166893005
Combining transfer learning with data augmentation increased the accuracy to over 85%.
References¶
Complete Machine Learning Package, Jean de Dieu Nyandwi, available at: https://github.com/Nyandwi/machine_learning_complete.
How to Develop a CNN from Scratch for CIFAR-10 Photo Classification, Jason Brownlee, available at: https://machinelearningmastery.com/how-to-develop-a-cnn-from-scratch-for-cifar-10-photo-classification/.
Python Machine Learning (2nd Ed.) Code Repository, Sebastian Raschka, available at: https://github.com/rasbt/python-machine-learning-book-2nd-edition.
BACK TO TOP